Polni pospešek in njegove komponente. Tangencialno pospeševanje in normalno pospeševanje. Formule in primer reševanja problemov
V kinematiki, da bi nedvoumno določili značilnosti gibanja telesa na kateri koli točki poti, je treba poznati njegovo hitrost in pospešek. Časovna odvisnost teh količin zagotavlja vse potrebne informacije za izračun poti, ki jo prevaža telo. Oglejmo podrobneje v članku, kaj je tangencialno pospeševanje in normalno pospeševanje.
V fiziki
Pred upoštevanjem pospeševanja za mehansko gibanje, normalno in tangencialno pospeševanje se seznanimo s fizičnim konceptom. Opredelitev pospeška je dokaj preprosta. V fiziki pod njim razumemo značilno spremembo hitrosti. Slednji je vektorska količina, ki določa hitrost spremembe koordinat premikajočega se predmeta v prostoru. Hitrost se meri v metrih na sekundo (prevožena razdalja na časovno enoto). Če je označen s simbolom v¯, potem bo matematična definicija pospeška a¯ izgledala takole:
a¯ = dv¯ / dt
Ta enakost opredeljuje tako imenovani popolni trenutni pospešek. Imenuje se takojšnje, ker označuje spremembo hitrosti le v določenem času.
Če je gibanje enako pospešeno, to je za dolgo časa, pospešek ne spremeni svojega modula in smeri, potem lahko napišemo naslednjo formulo, da jo določimo:
a¯ = Δv¯ / Δt
Kjer je Δt >> dt. Vrednost tukaj imenujemo povprečni pospešek, ki se na splošno razlikuje od trenutnega.
Pospešek se meri v sistemu SI v metrih na kvadratni sekundi (m / s 2 ).
Trajektorija in komponente polnega pospeška
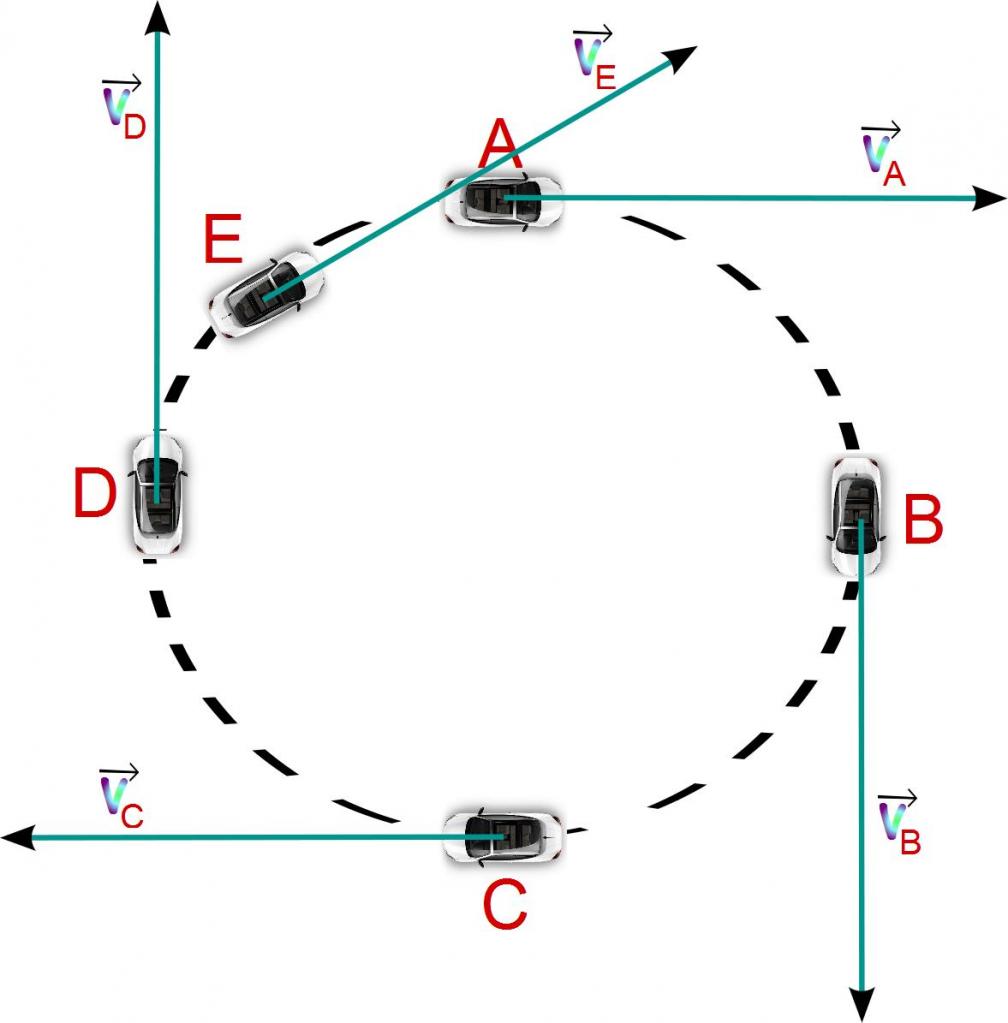
Najpogosteje se telesa v naravi gibajo vzdolž zakrivljenih poti. Primeri takšnega gibanja so: rotacija planetov v njihovih orbitah, parabolični padanje kamna na zemlji, obračanje avtomobila. V primeru krivuljne trajektorije v vsakem trenutku je hitrost usmerjena tangencialno na zadevno krivuljo. Kako je usmerjeno pospeševanje?
Za odgovor na zgornje vprašanje napišemo hitrost telesa v naslednji obliki:
v¯ = v * u t ¯
Tu je u t ¯ vektor hitrostne enote, indeks t pomeni, da je usmerjen tangencialno na trajektorijo (tangencialna komponenta). Simbol v označuje modul hitrosti v.
Zdaj, po definiciji pospeševanja, lahko hitrost ločimo glede na čas, imamo:
a¯ = dv¯ / dt = dv / dt * u t ¯ + v * d (u t ¯) / dt
Tako je celotni pospešek a¯ vektorska vsota dveh komponent. Prvi in drugi izraz se imenujejo normalno in tangencialno točkovno pospeševanje. Podrobneje si oglejte vsako od teh komponent.
Ad
Tangencialni pospešek
Še enkrat zapišemo formulo za to komponento polnega pospeška:
a t ¯ = dv / dt * u t ¯
Ta izraz nam omogoča, da opišemo lastnosti t ¯:
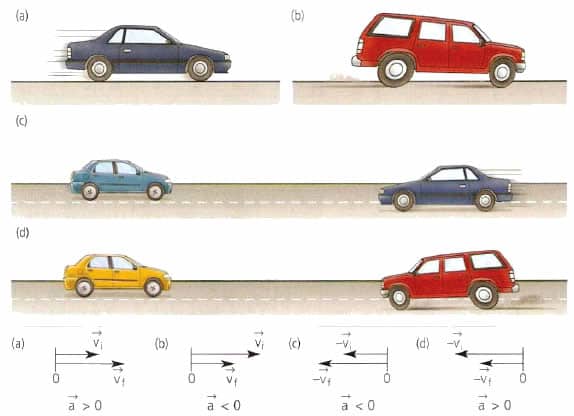
- Usmerjena je na enak način kot hitrost sama ali nasprotno od nje, to je vzdolž tangente na pot. To dokazuje elementarni vektor u t ¯.
- Značilna je sprememba hitrosti v absolutni vrednosti, ki se odraža s faktorjem dv / dt.
Te lastnosti nam omogočajo, da naredimo pomemben zaključek: za pravokotna gibanja sta polni in tangencialni pospeški enake vrednosti. V primeru ukrivljenega gibanja je celotni pospešek vedno večji od tangencialnega. Pri fizikalnih nalogah za pravokotno enakomerno pospešeno gibanje govorimo o tej komponenti pospeševanja.
Pospešek je normalen
Glede na temo hitrosti, pospeševanja tangencialnega in pospeševanja normale podajamo opis zadnje vrednosti. Za to pišemo formulo:
a n ¯ = v * d (u t ¯) / dt = v * d (u t ¯) / dL * dL / dt
Za izrecno zapisovanje desne strani enakosti uporabljamo naslednje odnose:
dL / dt = v;
d (u t ¯) / dL = 1 / r
Tu je dL razdalja, ki jo telo prevaža v časovnem intervalu dt, r je polmer ukrivljenosti trajektorije. Prvi izraz ustreza definiciji hitrosti, druga enakost izhaja iz geometrijskih premislekov. Z uporabo teh formul dobimo končni izraz za normalno pospeševanje:
Ad
a n ¯ = v 2 / r
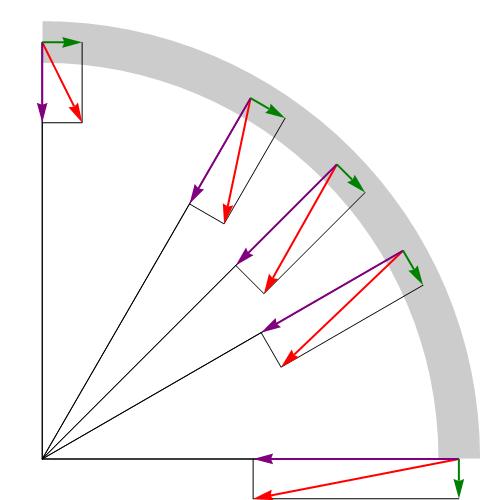
To pomeni, da vrednost a n ¯ ni odvisna od spremembe hitrosti, kot tangencialne komponente, temveč je določena samo z njenim modulom. Normalno pospeševanje vzdolž normale na ta del poti je usmerjeno, to je proti središču ukrivljenosti. Na primer, ko se gibljemo po krogu, je vektor a n ¯ usmerjen v njegovo središče, zato se normalno pospeševanje pogosto imenuje centripetal.
Če je pospešek odgovoren za spremembo tangencialnega pospeševanja, potem je normalna komponenta odgovorna za spreminjanje vektorja hitrosti, kar pomeni, da določa trajektorijo telesa.
Polni, normalni in tangencialni pospešek
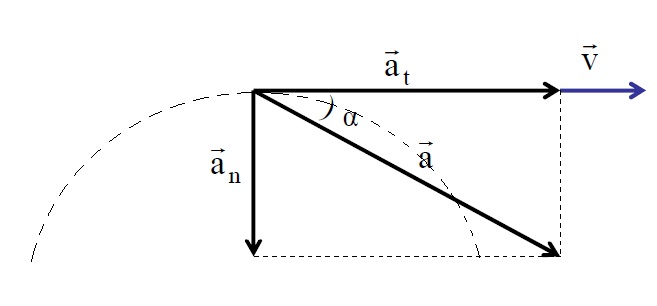
Z obravnavo pojma pospeševanja in njegovih sestavnih delov podajamo formulo, ki nam omogoča, da določimo polni pospešek. Ker so obravnavane komponente usmerjene med seboj pod kotom 90 o , lahko Pitagorjev izrek uporabimo za določitev absolutne vrednosti njihove vektorske vsote. Formula za popolni pospešek je:
a = √ (a t 2 + a n 2 )
Smer velikosti a se lahko določi glede na vektor katere koli komponente. Na primer, kot med a in n ¯ se izračuna kot:
θ = arctan (a t / a n )
Glede na zgornjo formulo za modul a lahko sklepamo: s enakomernim gibanjem po krogu polni pospešek sovpada s centripetalnim.
Reševanje problemov
Naj se telo giblje v krogu s polmerom 1 metra. Znano je, da se hitrost spreminja v skladu z naslednjim zakonom:
v = 2 * t 2 + 3 * t
Potrebno je določiti tangencialni pospešek in normalni pospešek v trenutku t = 4 sekunde.
Za tangencialno imamo:
a t = dv / dt = 4 * t + 3 = 19 m / s 2
Da bi našli normalni modul pospeška, morate najprej izračunati vrednost hitrosti v danem trenutku. Imamo:
v = 2 * 4 2 + 3 * 4 = 44 m / s
Zdaj lahko uporabite formulo za n :
a n = v 2 / r = 44 2/1 = 1936 m / s 2
Tako smo določili vse količine, ki so bile potrebne za rešitev problema.