Kaj je deformacija? Vrste deformacij
Človek se začne soočati s procesom deformacije od prvih dni svojega življenja. Naredi nas občutek dotika. Živopisan primer deformacije iz otroštva se lahko spomni na plastelin. Obstajajo različne vrste deformacij. Fizika pregleduje in proučuje vsakega od njih. Najprej predstavimo definicijo samega procesa in nato postopoma preučimo možne klasifikacije in vrste deformacij, ki se lahko pojavijo v trdnih predmetih.
Opredelitev
Deformacija je proces gibanja delcev in elementov telesa glede na njihov medsebojni položaj v telesu. Preprosto povedano, gre za fizično spremembo zunanjih oblik predmeta. Obstajajo naslednje vrste deformacij:
- premik;
- torzija;
- zavoj;
- kompresijsko deformacijo.
Kot vsaka druga fizikalna količina se lahko sev izmeri. V najenostavnejšem primeru se uporabi naslednja formula:
e = (p 2 -p 1 ) / p 1,
kjer je e najpreprostejša elementarna deformacija (povečanje ali zmanjšanje dolžine telesa); p 2 in p 1 - dolžina telesa po in pred deformacijo.

Razvrstitev
Na splošno lahko ločimo naslednje vrste deformacij: elastičnost in neelastičnost. Elastične ali reverzibilne deformacije izginejo, ko sila, ki deluje na njih, izgine. Osnova tega fizičnega zakona se uporablja v močnostnih simulatorjih, na primer v ekspanderju. Če govorimo o fizični komponenti, potem je osnova reverzibilni premik atomov - ne presegajo meja interakcije in okvira medatomskih vezi.
Neelastične (nepovratne) deformacije, kot razumete, so nasprotni proces. Vsaka sila, ki deluje na telo, pušča sledove / deformacijo. Ta vrsta vpliva vključuje tudi deformacijo kovin. S tovrstno spremembo oblike se lahko pogosto spremenijo tudi druge lastnosti materiala. Na primer, med deformacijo, ki jo povzroči hlajenje, se moč izdelka lahko poveča.
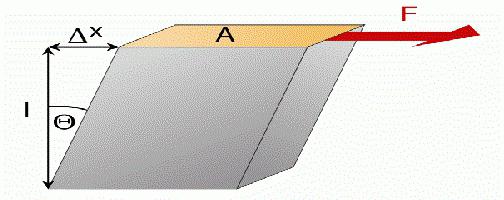
Shift
Kot smo že omenili, obstajajo različne vrste deformacij. Delijo jih narava spremembe oblike telesa. V mehaniki se sprememba oblike imenuje premik, v katerem je spodnji del žarka fiksiran in je sila uporabljena glede na zgornjo površino. Relativna strižna deformacija se določi z naslednjo formulo:
tgQ = X 12 / B
kjer je X 12 absolutni premik plasti telesa (to je razdalja, ki se je premaknila); B je razdalja med fiksno podlago in vzporedno premaknjeno plastjo.
Torzija
Če bi se vrste mehanskih deformacij razdelile glede na kompleksnost izračunov, bi to pomenilo prvo mesto. Takšna sprememba oblike telesa se pojavi, ko nanj uporabimo dve sili. V tem primeru poteka premik katere koli točke telesa pravokotno na os delovalnih sil. Če govorimo o tej vrsti deformacij, je treba navesti naslednje vrednosti, ki jih je treba izračunati:
- F - kot zasuka valjaste palice.
- T - trenutek delovanja.
- L je dolžina palice.
- G - vztrajnostni moment.
- W je strižni modul.
Formula izgleda takole:
F = (T * L) / (G * F).
Druga vrednost, ki jo je treba izračunati, je relativni kot zavoja:
Q = F / L (vrednosti so vzete iz prejšnje formule).
Bend
To je vrsta deformacije, ki se pojavi, ko se položaj in oblika osi žarka spremenita. Prav tako je razdeljen na dve vrsti - poševni in ravni. Neposredno upogibanje je vrsta deformacije, pri kateri deluje sila pade neposredno na os zadevnega žarka, v vsakem drugem primeru gre za poševno upogibanje.
Natezna kompresija
Različne vrste deformacij, katerih fizika je dobro raziskana, se redko uporabljajo za reševanje različnih problemov. Vendar pa se pri študiju v šoli eden izmed njih pogosto uporablja za določanje ravni znanja študentov. Poleg tega imena ima ta vrsta deformacije še eno, ki se sliši tako: linearno napetostno stanje.
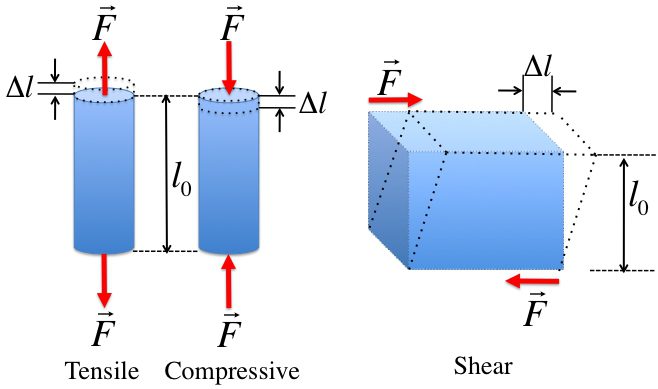
Raztezanje (stiskanje) nastopi, če sila, ki deluje na predmet, prehaja skozi središče njene mase. Če govorimo o vizualnem primeru, potem raztezanje vodi do povečanja dolžine palice (včasih do razpok) in stiskanja - do zmanjšanja dolžine in pojava vzdolžnih krivin. Napetost, ki jo povzroča ta vrsta deformacije, je neposredno sorazmerna sili, ki deluje na telo, in obratno sorazmerna s površino prečnega prereza.
Hookejev zakon
Temeljni zakon, ki se upošteva pri deformaciji telesa. Po njegovem mnenju je deformacija, ki se pojavi v telesu, neposredno sorazmerna s silo, ki deluje. Edino opozorilo je, da je uporabno le za majhne vrednosti deformacij, saj pri velikih vrednostih in če je meja sorazmernosti presežena, postane to razmerje nelinearno. V najpreprostejšem primeru (za tanko natezno palico) ima Hookejev zakon naslednjo obliko:
F = k * L,
kjer je F uporabljena sila; K - koeficient elastičnosti; L je sprememba dolžine žarka.
Če je vse jasno z dvema vrednostma, je koeficient (k) odvisen od več dejavnikov, kot je material izdelka in njegove dimenzije. Njegovo vrednost lahko izračunamo tudi po naslednji formuli:
k = (E * C) / L,
kjer je E Youngov modul; C je površina prečnega prereza; L je dolžina žarka.
Sklepi
Dejansko obstaja veliko načinov za izračun deformacije objekta. Različne vrste deformacij uporabljajo različne koeficiente. Vrste deformacij se razlikujejo ne samo v obliki rezultata, temveč tudi v silah, ki delujejo na predmet, in za izračune potrebujete izjemna prizadevanja in znanja na področju fizike. Upamo, da vam bo ta članek pomagal razumeti razumevanje osnovnih fizikalnih zakonov in vam tudi omogočiti, da se malo premaknete v to fizike.